
|
Workflow: Post-processing of UAV data |
|
Overview EZSurv allows to post-process your drone (UAV) flight’s positions and extract from it an interpolated position for each camera image. Post-processing is available when GNSS raw observations are recorded from either single or dual frequency receivers. |
|
Post-processing workflow for UAV data |
|
How to post-process your UAV Flight data
First, make sure that you transferred your receiver log file (or its RINEX files) and your camera event file (images with time trigger) to your PC.
To go through the post-processing steps mentioned above, please watch the following video: How to configure EZSurv and post-process UAV files |
|
1. Configure EZSurv for your area (regional Datum, projection and geoid model); 2. Post-process your flight trajectory (in-flight positions of the UAV according to receiver data rate); 3. Interpolate the accurate position for each camera event, based on your UAV specifications;
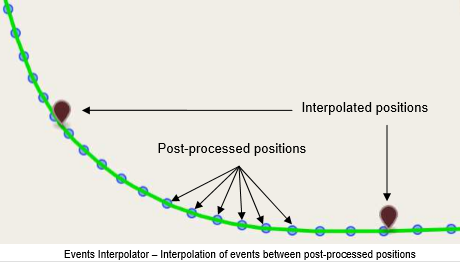
EZSurv calculates drone (UAV) in-flight positions through GNSS observations. From the drone trajectory positions, EZSurv’s Events Interpolator precisely interpolate every image position based on time trigger.
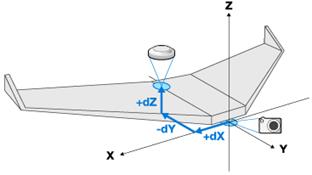
Moreover, for fixed wings UAV (or copter used as fixed wings), if the GNSS antenna is not aligned with your camera center, EZSurv’s event interpolator allows to enter the offset between camera and GNSS antenna in order to output event’s position calculated at camera center.
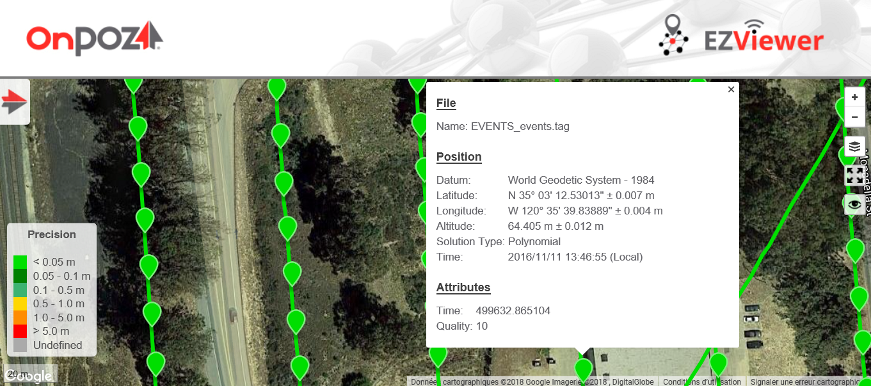
4. View your results in EZViewer.
|
|
Article: 000143 Related Products: EZSurv Last Update: 2021-06-30 16:06:51 |
|
Document information |
|
|
|
EZSurv PPK accuracy Horizontal Accuracy : 10mm + 1.0ppm or better Vertical Accuracy : 15mm + 1.0ppm (or better) To ensure high accuracy with single frequency receiver: use a reference station located at a maximum distance of 10 km and make sure to record GNSS observations with an unobstructed antenna for at least 30 minutes. If the flight time is shorter than 30 minutes, simply continue to record GNSS observations after landing. |
|
Precision and reliability may be subject to anomalies due to multipath, obstructions, satellite geometry and atmospheric conditions. The specifications stated recommend the use of stable mounts in an open sky view, EMI and multipath clean environment, optimal GNSS constellation configurations, along with the use of survey practices that are generally accepted for performing the highest-order surveys for the applicable application including appropriate kinematic antenna manipulation. Kinematic file distant from the reference station affect accuracy and is relative to the technology used (dual or single frequency receivers). |